Weston Middle School
Technology/EngineeringCourse Materials
Navigation
Following programming lesson, where robots loop the distance between lines using rotations or time, students describe what they notice about the course differences in the 4 times loop vs. the 2 times loop. Most realize that the slightest error in the first loop is compounded the greater the distance traveled.
Demos:
Draw on board a beginning point. Add a straight line of points about 1 foot apart extending off at a 40-degree angle for about 6 feet. Then, using an eraser as a “boat,” chart a course a few degrees off the true course and watch the increasing error or discrepancy in positioning as the eraser moves further along.
Until the mid-19th century vessel speed at sea was measured using a chip log. This consisted of a wooden panel, weighted on one edge to float upright and thus have substantial water resistance, attached by line to a reel. The chip log was "cast" over the stern of the moving vessel and the line allowed to pay out. Knots placed at a distance of 47 feet 3 inches (14.4018 m) passed through a sailor's fingers, while another sailor used a 30 second sandglass (28 second sandglass is the current accepted timing) to time the operation.[7] The knot count would be reported and used in the sailing master's dead reckoning and navigation. This method gives a value for the knot of 20.25 in/s
Ask if being at sea (assuming the robot could float) would make it more difficult to program a course and why. (Waves, currents, storms, fog, how to figure speed and position, etc. )
Show old motor (RCX) and explain the lack of sophistication in its capabilities compared to the NXT- cannot directly measure rotations( distance) or synchronize speed of left and right motors.
In the same way, history is the story of technology making leaps forward, as in the story of longitude in the 1700’s. Just as you were able to make a robot go where you want it to go, this is the story of how a captain works to make a ship go where he wants it to go.

Show excerpts from Nova- The
Search for Longitude.
John Harrison, Clockmaker

Harrison's First Sea Clock H1

Harrison's Chronometer H4, Winner of the Longitude Prize
Define the Problem:
How do students program the robot to run along the proscribed course? The first challenge is based on time. Longitude is also based on time (whereas latitude can be charted by watching the heavens).
Have students “ sight” an object in the room with hands in v shape representing a sextant.
http://en.wikipedia.org/wiki/Sextant
Columbus sailed the parallels to America with the help of currents. He could tell if he were on course by looking to the skies, but what he could not tell was how far along the parallels he had gone.
Show grid system, describe degrees.
Go for understanding: How does time translate to distance?
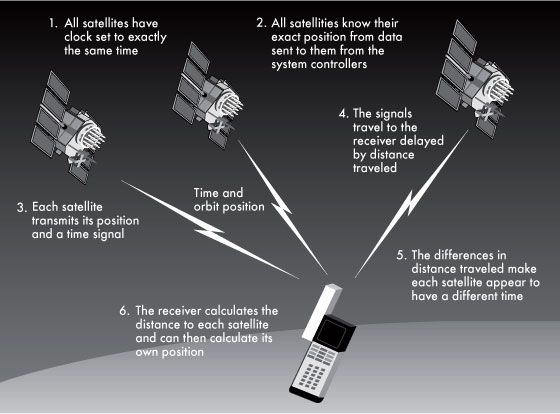
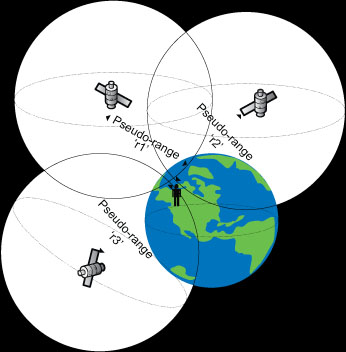
End with GPS and nuclear clocks.

Links
Royal Naval Observatory Greenwich: Harrison and the Longitude Problem
Nova- The Search for Longitude
EditR egio
egio
Ship's Compass, Royal Dockyards, Portsmouth, Englandn5